
Transformer与强化学习结合提升物联网智能决策
在数字化时代,物联网(IoT)的兴起已经彻底改变了我们与物理世界的互动方式。通过将日常家居用品到精密的工业机械等设备连接到互联网,IoT构建了一个庞大的互联生态系统,它所产生的数据量是前所未有的。这些数据为我们提供了丰富的信息资源,有潜力彻底改变智能家居、医疗保健、城市基础设施以及制造业等多个领域的决策过程。然而,这些机遇同时也带来了挑战。IoT环境的复杂性、动态性和规模之大,对数据的解释和有效行
人工智能咨询培训老师叶梓 转载标明出处
在数字化时代,物联网(IoT)的兴起已经彻底改变了我们与物理世界的互动方式。通过将日常家居用品到精密的工业机械等设备连接到互联网,IoT构建了一个庞大的互联生态系统,它所产生的数据量是前所未有的。这些数据为我们提供了丰富的信息资源,有潜力彻底改变智能家居、医疗保健、城市基础设施以及制造业等多个领域的决策过程。然而,这些机遇同时也带来了挑战。IoT环境的复杂性、动态性和规模之大,对数据的解释和有效行动提出了重大挑战。传统的强化学习(RL)技术,尽管在通过试错学习最优行为方面具有潜力,但在处理IoT设备产生的高维异构数据流时常常受限。这些数据流可能会压倒传统的RL算法,妨碍它们的学习效率和决策准确性。
本文针对这些局限性,提出了一种创新的解决方案,引入了一种新的框架,该框架将Transformer架构与近端策略优化(PPO)结合起来,以增强在动态IoT环境中的理解和行动能力。通过利用Transformer的自注意力机制,不仅提高了状态表示的质量,而且在多个IoT场景中展示了与传统RL方法相比在决策效率、适应性和整体性能方面的显著改进。
本文旨在解决传统RL方法在处理IoT数据时面临的挑战,并推动智能自动化和决策制定在IoT领域的革命性进步。此方法不仅为IoT数据的复杂性和动态决策提供了解决方案,而且为智能IoT系统的研究和应用开辟了新的途径。
方法
在IoT环境中,数据的预处理是至关重要的一步。对于连续变量,如传感器读数,通过归一化处理来缩小其数值范围,使其落入一个统一的区间,通常是[0, 1]。这一过程不仅有助于提高学习算法的收敛速度,还能避免数值计算中的不稳定性。归一化公式定义为:  其中,x 是原始的传感器读数,min(x) 和 max(x)分别代表数据中的最小值和最大值。
其中,x 是原始的传感器读数,min(x) 和 max(x)分别代表数据中的最小值和最大值。
对于分类变量,采用独热编码将其转换为二进制向量格式。这种转换使得原本的类别数据能够以一种适合神经网络处理的形式输入到模型中。
Transformer模型的引入是为了更好地处理IoT数据流中的序列和时空模式。自注意力机制是Transformer的核心,它允许模型在处理数据时能够捕捉到不同位置间的相关信息,其定义如下:

其中,Q、K 和 V 分别代表查询(query)、键(key)和值(value)矩阵,dk 是键向量的维度,影响注意力机制中的缩放因子。
为了应对高维IoT数据的挑战,引入了一个嵌入层来降低数据的维度,使得数据在通过自注意力机制处理前,能够被有效地投影到一个更低维的空间中:  这一层将高维数据x 投影到低维空间 E,从而提高处理效率。
这一层将高维数据x 投影到低维空间 E,从而提高处理效率。
强化学习组件通过使用Transformer的输出来指导决策制定。状态空间 S、动作空间 A 和奖励函数 R(s,a) 被明确定义,其中∈S 代表状态,a∈A 代表动作。策略网络,由参数 θ 参数化,优化了从状态到动作的映射:
目标函数 J(θ) 旨在最大化期望累积奖励,表示为: 近端策略优化(PPO)算法用于更新策略参数 θ 以提高性能,它使用一个裁剪的替代目标函数来实现稳定学习:
近端策略优化(PPO)算法用于更新策略参数 θ 以提高性能,它使用一个裁剪的替代目标函数来实现稳定学习: 其中,rt(θ) 表示当前策略相对于旧策略在状态 st 下采取动作at 的概率比率,A^t 是估计的优势,而ϵ 是一个超参数,用于确定裁剪范围,以避免过大的策略更新。
其中,rt(θ) 表示当前策略相对于旧策略在状态 st 下采取动作at 的概率比率,A^t 是估计的优势,而ϵ 是一个超参数,用于确定裁剪范围,以避免过大的策略更新。
迭代训练过程基于环境反馈更新Transformer和RL组件。算法1详细描述了训练过程,包括初始化Transformer参数 θT 和RL参数θRL,收集数据流,数据预处理,初始化集 episode 奖励,生成状态表示,选择动作,执行动作以获取奖励和新状态,累积集 episode 奖励,存储转换到回放缓冲区,以及使用收集到的转换和PPO算法更新θT 和θRL。这个过程在多个周期内重复进行,每个周期都包括与IoT环境的交互,以此来优化模型的性能。

实验
研究者们采用了Python 3.8作为编程语言,利用其广泛的库支持,特别是PyTorch这一强大的神经网络库。PyTorch提供了动态计算图和自动微分系统,使得研究人员能够灵活地定义和实现复杂的模型结构。
为了实现Transformer模型,研究者们采用了HuggingFace的Transformers库。这个库提供了一系列的预训练模型和工具,使得研究人员能够快速地集成和定制Transformer架构以适应IoT数据的特点。同时,为了部署和实现强化学习算法,特别是近端策略优化(PPO),研究者们使用了Stable Baselines库,它为强化学习研究提供了一套稳定和高效的算法实现。
研究者们通过SimPy库模拟了一个复杂的智能城市IoT环境。SimPy是一个基于进程的离散事件仿真框架,它允许研究人员模拟各种IoT设备和它们之间的交互,生成了能够反映真实世界复杂性的实时数据流。
在模型配置方面,研究者们选择了一个具有512个嵌入维度和6个编码器层的Transformer架构。这种配置旨在捕获IoT数据中的序列和时空模式,同时保持计算效率。Transformer模型的自注意力机制能够动态地识别和处理数据中的关键信息,这对于理解和预测IoT环境中的复杂模式至关重要。
为了适应强化学习任务,研究者们构建了一个全连接的神经网络作为RL策略网络。这个网络包含两个隐藏层,每层有256个神经元,这使得网络能够学习和优化复杂的决策策略。策略网络的目标是最大化期望的累积奖励,这在强化学习中是核心目标。
研究者们将训练过程设置为1000个周期,每个周期模拟智能城市环境中24小时的交互。这种长时间的训练周期允许模型充分学习和适应IoT环境的动态变化。在每个周期中,模型会收集数据流,通过预处理步骤将其转换为适合模型输入的格式。然后,模型会生成状态表示,选择动作,并在环境中执行这些动作以获得奖励和新的状态。这些转换和奖励会被存储在回放缓冲区中,用于后续的训练和策略更新。
通过这种迭代的训练过程,模型能够逐渐学习如何在复杂的IoT环境中做出最优的决策。研究者们使用PPO算法来更新策略网络的参数,这是一种有效的策略梯度方法,能够在保持学习稳定性的同时,提高模型的性能。
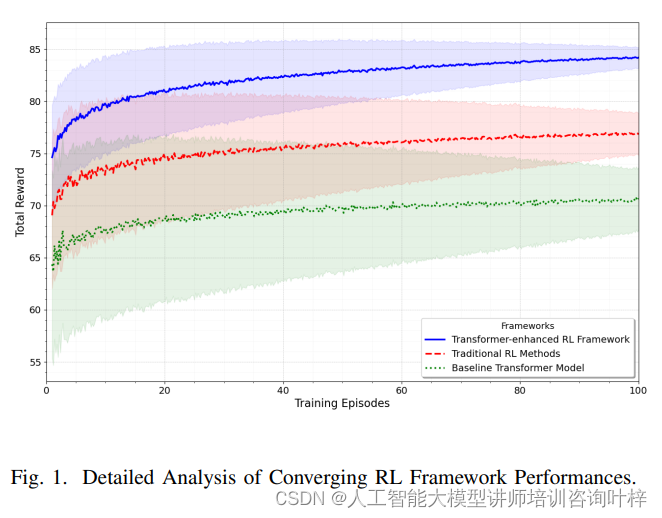
实验结果显示了Transformer增强的RL框架在决策效率方面的显著提升。在与时间赛跑的IoT环境中,快速准确的决策是至关重要的。该框架通过更高效的数据处理和模式识别能力,实现了更快的决策制定。与传统RL方法和基线Transformer模型相比,新框架在多个训练周期中的总奖励持续增加,这一趋势表明了其更优的收敛行为。这不仅意味着模型能够更快地学习,而且还能够更有效地从环境中提取有价值的信息,以做出更好的决策。

在任务完成时间的比较中,Transformer增强的RL框架同样表现出色。实验结果显示,与传统RL方法和基线模型相比,新框架在完成任务所需的时间上实现了显著减少。这种效率的提升直接转化为更快的响应时间和更高的任务吞吐量,这对于需要快速反应的IoT应用场景尤为重要。

对于IoT设备响应时间的测试进一步证明了新框架的高效能力。在各种IoT设备上,新框架的响应时间一致地更低,这突出了其在处理复杂IoT数据流方面的优越性能。快速的响应时间对于确保IoT系统能够及时响应环境变化和用户需求至关重要,有助于提升用户体验和系统的整体性能。

随着IoT设备数量的增加,系统的延迟问题也日益凸显。实验中,新框架在系统延迟方面表现出更平缓的增长,这与传统RL方法和基线模型相比,显示出了更好的效率和管理能力。这种对系统延迟的有效控制,意味着即使在设备数量增多、数据量增大的情况下,新框架也能够保持较低的延迟水平,从而确保系统的响应速度和稳定性。

实验结果表明,Transformer增强的RL框架在多个关键性能指标上均优于传统方法和基线模型。这些成果不仅验证了该框架在IoT环境中处理复杂决策任务的有效性,而且为未来的研究和应用提供了新的方向和可能性。随着IoT技术的不断发展,这种结合了先进神经网络架构和强化学习的框架有望在智能自动化和决策制定方面带来革命性的变革。
论文链接:https://arxiv.org/abs/2404.04205
更多推荐

 12
12 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)